реклама
Автомобилите с дистанционно управление са забавни, разбира се, но самостоятелно шофиране роботизираните автомобили са още по-забавни. В този урок ще създадем робот с четири колела, който може да се движи наоколо и да избягва препятствия. Купих този пълен 4WD комплект от AliExpress, но бихте могли лесно да закупите повечето от тези компоненти от магазин за електроника и сами да ги съберете.
Препоръчвам ви да прочетете всички инструкции, преди да започнете, тъй като това ще изясни някои неща, които могат да бъдат объркващи при първия път. Освен това това може да изглежда като много дълъг, усъвършенстван проект поради дължината на инструкциите, но всъщност е доста проста. Не е необходимо да се сплашвате - това е проект за начинаещо ниво, с който можете да получите задоволителни резултати, след което да надграждате, докато научите повече. Не харесвате ли този стил на робота? Ето още няколко Arduino роботи 8 Arduino роботи, които можете да изградите за по-малко от $ 125Arduino може да направи много, но знаехте ли, че може да създаде пълноценни роботи? За доста евтини също! Прочетете още можете лесно да изградите вместо това.
Ето какво имаме, след като извадим всичко от опаковката:

За да започнем, ще прикрепим двигателите и H моста (картата, която захранва моторите) в долната част на шасито. Първо, прикрепете четирите метални скоби (те са правоъгълни, пробити метални блокове) към всеки двигател, като използвате два дълги болта и две гайки.
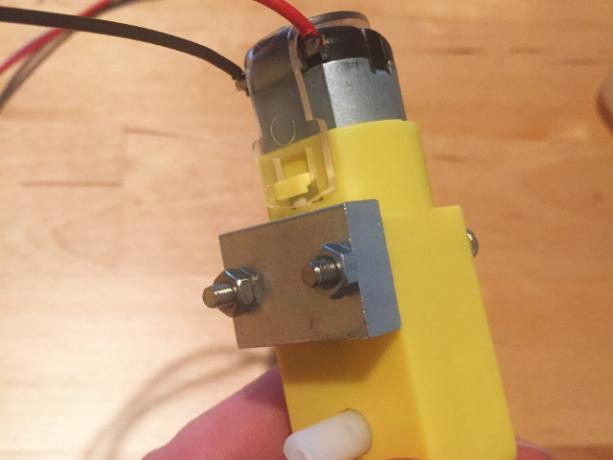
Ще трябва да се уверите, че те са прикрепени правилно, така че проверете изображението по-долу, за да сте сигурни, че страната на блока с два пробити дупки ще бъде обърната надолу. Обърнете внимание, че проводниците на всеки двигател са насочени към центъра на шасито.
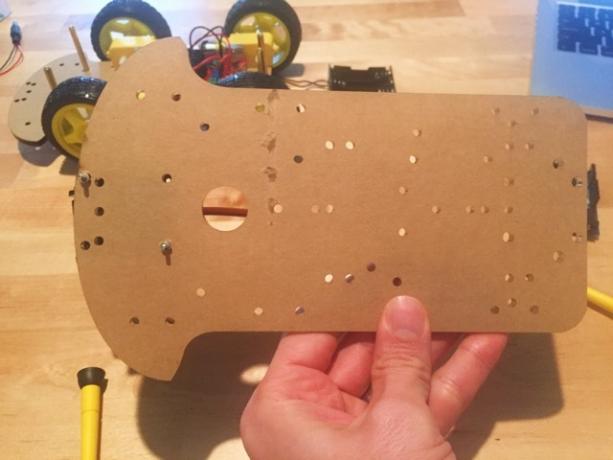
Сега всеки мотор може да бъде прикрепен към шасито, като се използват два къси болта в долната част на всяка метална скоба. Ето изглед на дъното на шасито, за да можете да видите къде трябва да бъдат болтовете:
Следващата стъпка е да закрепите H моста (това е червената дъска в моя комплект) към шасито. Може да искате да изчакате, докато всички проводници се прикрепят към H моста, преди да направите това, но това зависи от вас (намерих, че е по-лесно). Бърза забележка: в комплекта ми липсваха редица крепежни елементи, затова използвах електрическа лента, за да закрепя моста. Можете обаче да видите тук къде биха отишли болтовете и гайките:
Сега, когато H мостът е прикрепен, можете да започнете да свързвате захранването. Тъй като държачът на батерията с шест AA е снабден с DC адаптер, ще трябва или да отрежете края (което направих аз) или да пуснете джъмперни проводници към самите батерии.

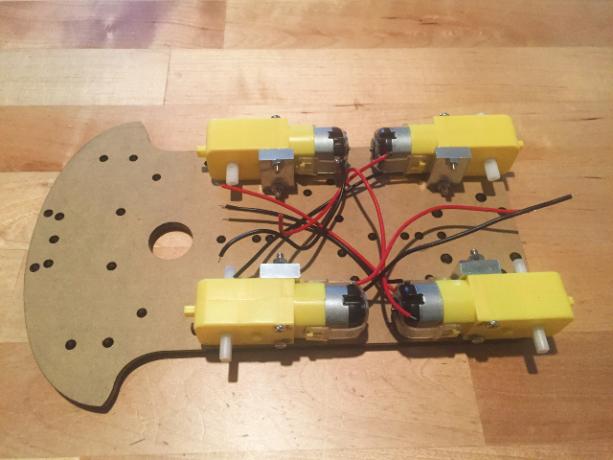
Без значение как сте решили да го направите, ще прекарате положителния проводник към порта с надпис „VMS“, а отрицателния проводник към този, обозначен с „GND“ на моста. Завинтете крепежните елементи и се уверете, че са сигурни. След това ще свържете проводниците на двигателя. От двете страни има набор от два порта; единият е с надпис „MOTORA“, а другият „MOTORB.“ И двете червени проводници от всяка страна ще влязат в най-централния зелен порт, а двете черни проводници ще влязат в най-външния. Тази картина трябва да направи по-ясна:
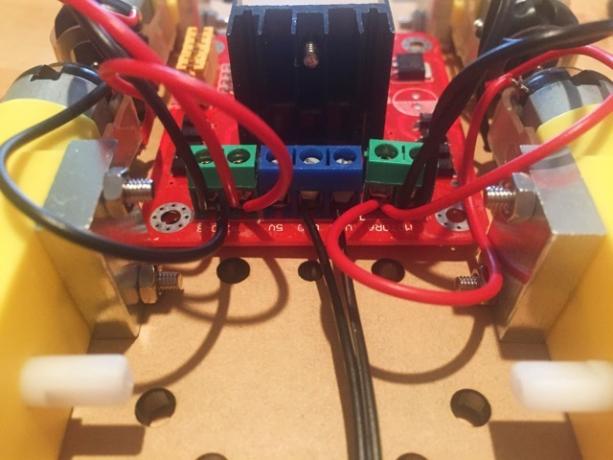
Открих, че трябва да отстраня част от корпуса на проводниците на двигателя, за да задействам това. След като разполагате с моторите и всички захранващи устройства, поставете колелата върху валовете на двигателя и прикрепете четирите медни вала на местата, показани на снимката по-долу (всеки меден вал се нуждае от един малък болт). Този робот започва да се оформя!
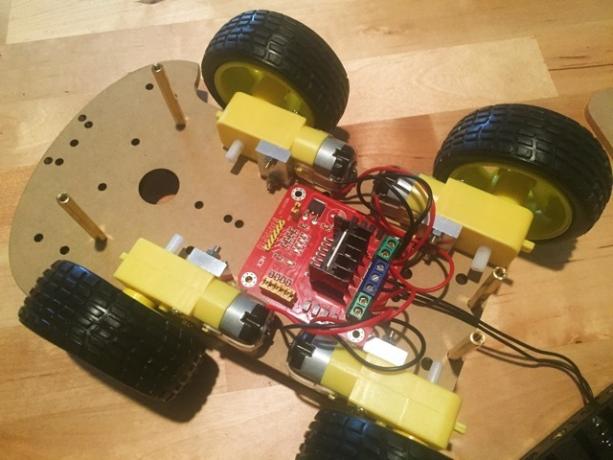
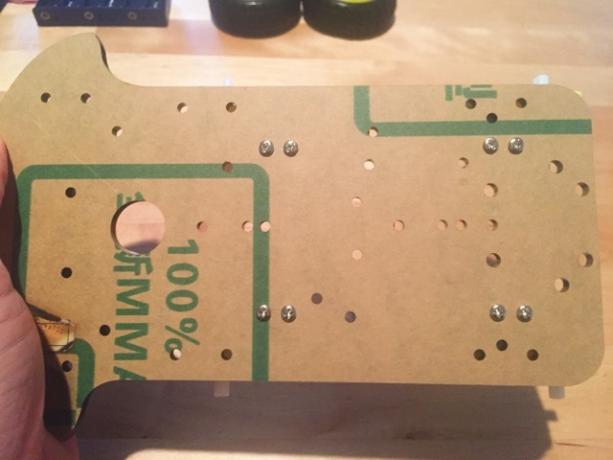
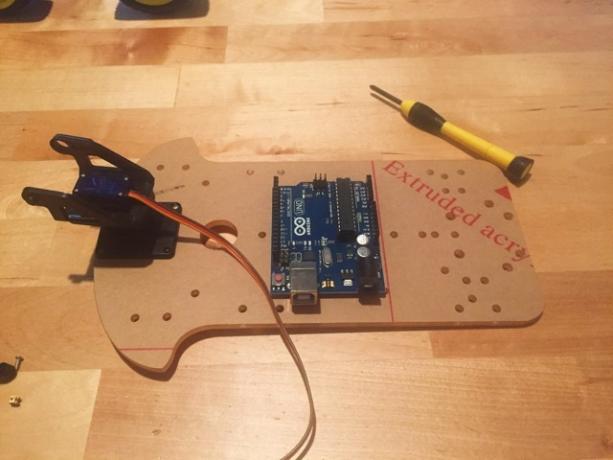
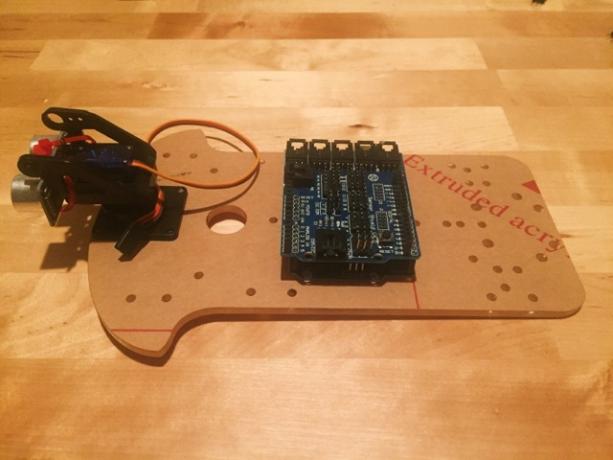
Сега оставете тази част на шасито встрани и хванете другата, която ще седи отгоре. Следващата стъпка е да прикрепите Arduino - отново трябваше да използвам електрическа лента, но вие трябва да можете да закрепите по-добре своите с болтове и гайки.

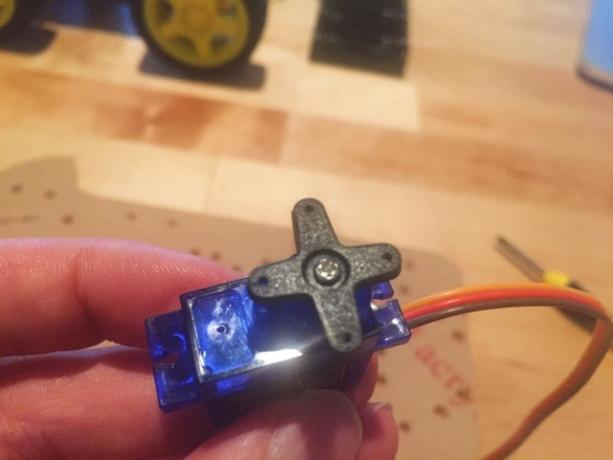
Следващата стъпка изисква микро серво, черният кръстосан елемент, държачът на серво (който се състои от три черни пластмасови парчета) и няколко малки винта. Използвайте един от по-големите остри винтове в комплекта, за да прикрепите черния кръстосан елемент към микро серво:
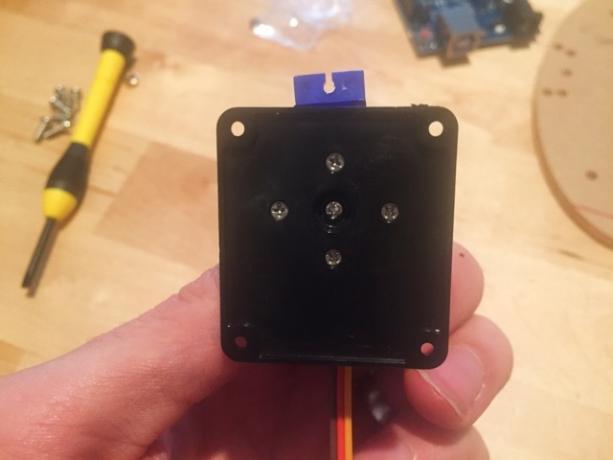
След това обърнете сервото нагоре в черния пластмасов пръстен на държача. Уверете се, че проводниците, излизащи от сервото, са обърнати в същата посока като по-дългата част на държача (отново вижте изображение по-долу) и използвайте четири малки винта, за да закрепите напречната греда (има четири отвора в държача, които се подравняват с дупките на напречна греда).

Ето как изглежда след като е прикачен:
И накрая, вземете другите две парчета на серводържача и ги щракнете върху сервото (има странични канали, които съвпадат с пластмасовата ламарина на сервото).
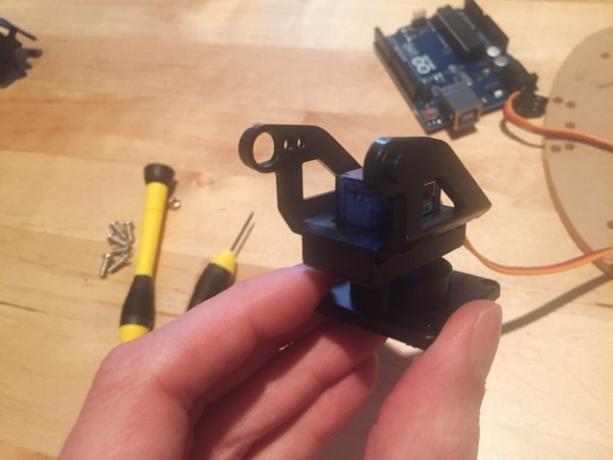
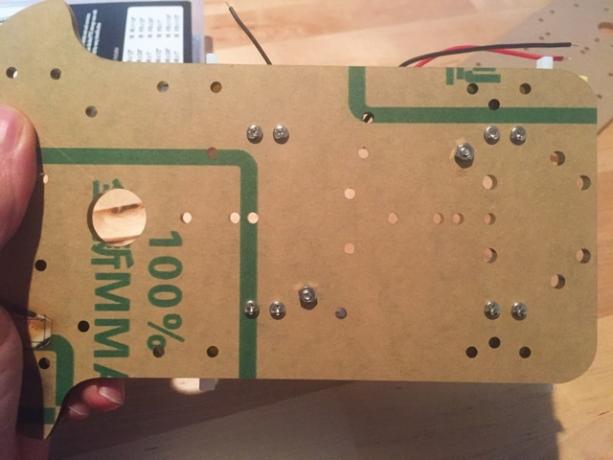
Сега, когато държачът на сервото е завършен, той може да бъде монтиран към шасито.
Ето къде отиват болтовете:
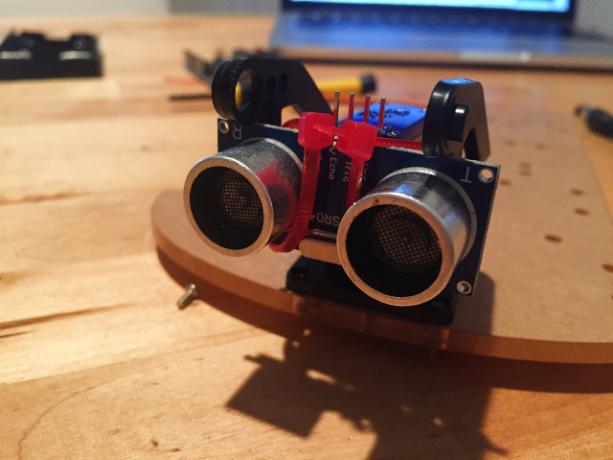
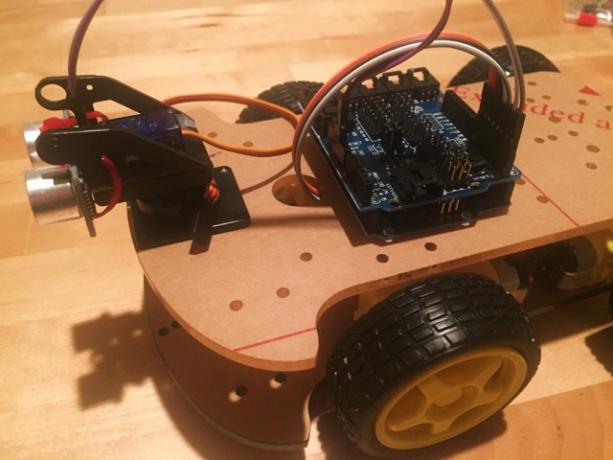
Време е да погледнем нашия робот. Прикрепете ултразвуковия сензор към серводържача с помощта на две ципове.
Ако работите от същия комплект като мен, ще получите Arduino сензорна екрана. Няма да го използваме в тази компилация, но можете да го пуснете върху UNO сега, ако искате (както имам на изображението по-долу). Просто подравнете щифтовете в долната част на щита с I / O портовете на Arduino и натиснете надолу, за да ги свържете. В момента не ти трябва, но щитовете могат да ви бъдат полезни Топ 4 Arduino щитове, за да надмогнете вашите проектиКупихте стартов комплект Arduino, спазихте всички основни ръководства, но сега ударихте спънка - имате нужда от повече битове и бобове, за да осъществите мечтата си за електроника. За щастие, ако имате ... Прочетете още .
Независимо дали свързвате сензорен щит или не, сега ще ви трябват четири проводника, за да свържете ултразвуковия сензор към Arduino. Има четири пина на сензора, VCC, GND, TRIG и ECHO. Свържете VCC към 5V щифт на Arduino, GND към GND и TRIG и ECHO към I / O щифтове 12 и 13.
Сега вземете долната част на шасито и свържете шест джъмперни проводника към I / O щифтовете на H моста (те са маркирани ENA, IN1, IN2, IN3, IN4 и ENB). Обърнете внимание кои цветни проводници са свързани към кои портове, както ще трябва да знаете по-късно.

Сега е време да започнем да събираме това нещо. Хванете горната част на шасито и го поставете върху медните валове, свързани с долната част, и издърпайте проводниците, прикрепени към моста H, през отвора в центъра на шасито. Свържете шестте проводника към I / O портовете, както следва:
- ENA до I / O порт 11
- ENB до I / O порт 10
- А1 до I / O порт 5
- A2 до I / O порт 6
- B1 до I / O порт 4
- B2 към входно / изходен порт 3
Сега използвайте четири къси винта, за да прикрепите горната част на шасито към медните валове. Поставете държача на батерията с шест AA отгоре на шасито (завийте го, ако можете), прикрепете 9V държача на клетката към Arduino и този бот е готов да се разклати!
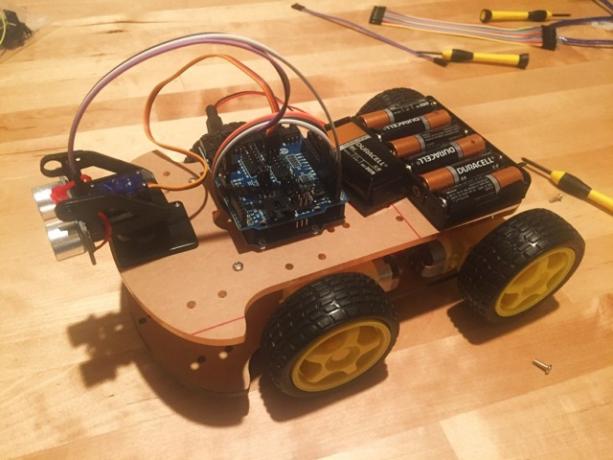
Е, почти готов за рок. Все още няма достатъчно личност.
Ето. Сега да му дам мозък. Нека да направим малко програмиране.
Първото нещо, което ще направим, е да проверим дали мостът и моторите са закачени правилно. Ето една бърза скица Това ще каже на бота да кара напред за половин секунда, да кара назад за половин секунда, след което да завие наляво и надясно:
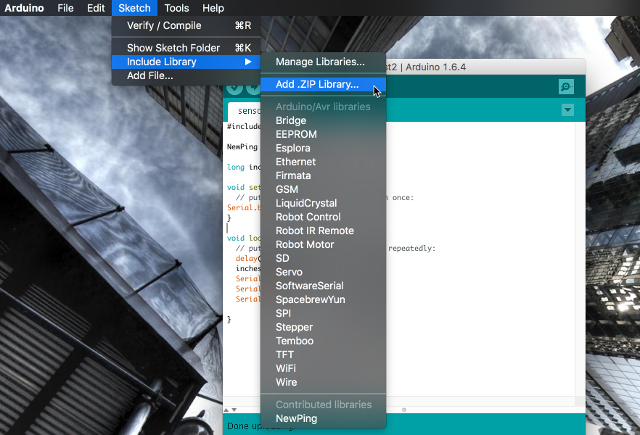
Това е много код за обикновен тест, но дефинирането на всички тези функции улеснява настройването по-късно. (Големи благодарности на Билуа за неговото публикация в блога за използване на Н-моста за определяне на тези функции.) Ако нещо се обърка, проверете всичките си връзки и дали проводниците са свързани към правилните щифтове. Ако всичко работи, е време да преминете към теста на сензора. За да използвате ултразвуковия сензор, ще искате изтеглете библиотеката на NewPingи след това използвайте Скица> Включване на библиотека> Добавяне на .ZIP библиотека… за да заредите библиотеката.
Уверете се, че виждате оператора за включване в горната част на скицата си; ако не го правите, удряйте Скица> Включване на библиотека> NewPing. След като направите това, заредете следната скица:
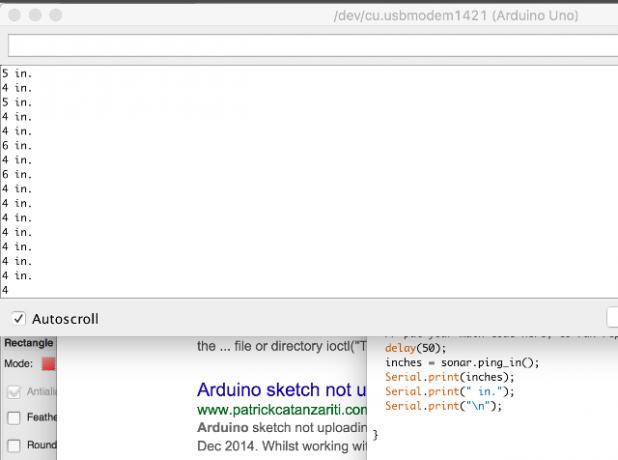
Качете скицата и отворете серийния монитор, като използвате Инструменти> Сериен монитор. Трябва да видите бързо актуализираща се последователност от числа. Дръжте ръката си пред сензора и вижте дали това число се променя. Преместете ръката си навътре и навън и трябва да получите измерване колко далеч е ръката ви от сензора.
Ако всичко е работило правилно, време е да се съберат всичко и да оставим това нещо да работи! Ето кода за робота сега. Както вероятно можете да разберете, това са основно двата тестови скици, поставени заедно с добавена операция if, за да се контролира поведението на робота. Предоставихме му много просто поведение за избягване на препятствия: ако открие нещо по-малко от четири инча, той ще направи резервно копие, завива наляво и ще започне да се движи отново. Ето видео на бота в действие.
Дайте на робота си малко живот
След като установите, че това поведение работи правилно, можете да добавите по-сложно поведение; накарайте робота да се редува между завиване наляво и надясно или да изберете произволно; звучи зумер, ако се доближи до нещо; просто завъртете, вместо да архивирате; наистина си ограничен само от въображението си Можете да използвате почти всичко във вашия Arduino стартов комплект Какво има в стартовия ви комплект Arduino? [Ардуино начинаещи]Сблъсквайки се с кутия, пълна с електронни компоненти, е лесно да бъдете затрупани. Ето ръководство за това какво точно ще намерите във вашия комплект. Прочетете още за да добавите повече функционалност. Ще забележите също, че все още не сме кодирали нищо за сервоуправлението: всъщност можете да накарате „очите“ на вашия робот да се движат напред-назад. може би да ги използвате, за да търсят път, а не просто да архивират всеки път, когато намерят пречка директно отпред.
Кажете ни, ако решите да изградите този робот или друг, и кажете как решавате да персонализирате неговото поведение или външен вид. Ако имате въпроси относно този робот, публикувайте ги в коментарите по-долу и ще видя дали мога да помогна!
Дан е стратегия за съдържание и маркетингов консултант, който помага на компаниите да генерират търсене и да водят. Той също така блогове за стратегия и маркетинг на съдържанието в dannalbright.com.


